0DOF
Bimanual Arms
Complete CAD, firmware, control code, and simulation tools openly available.
Smooth, human-like control with real-time gravity compensation.
Two-way force feedback for contact-rich teleoperation and real-world data collection.
Compliant, backdrivable joints enable safe, practical human-centered interaction.
Available as a DIY kit or fully assembled unit.
A reproducible evaluation cell that standardizes background, lighting, cameras, and arm position for fair, automated AI model comparison. "Model A outperforms Model B" only holds meaning when evaluated under identical conditions — OpenArm Cell provides the reproducible infrastructure to make such claims verifiable.
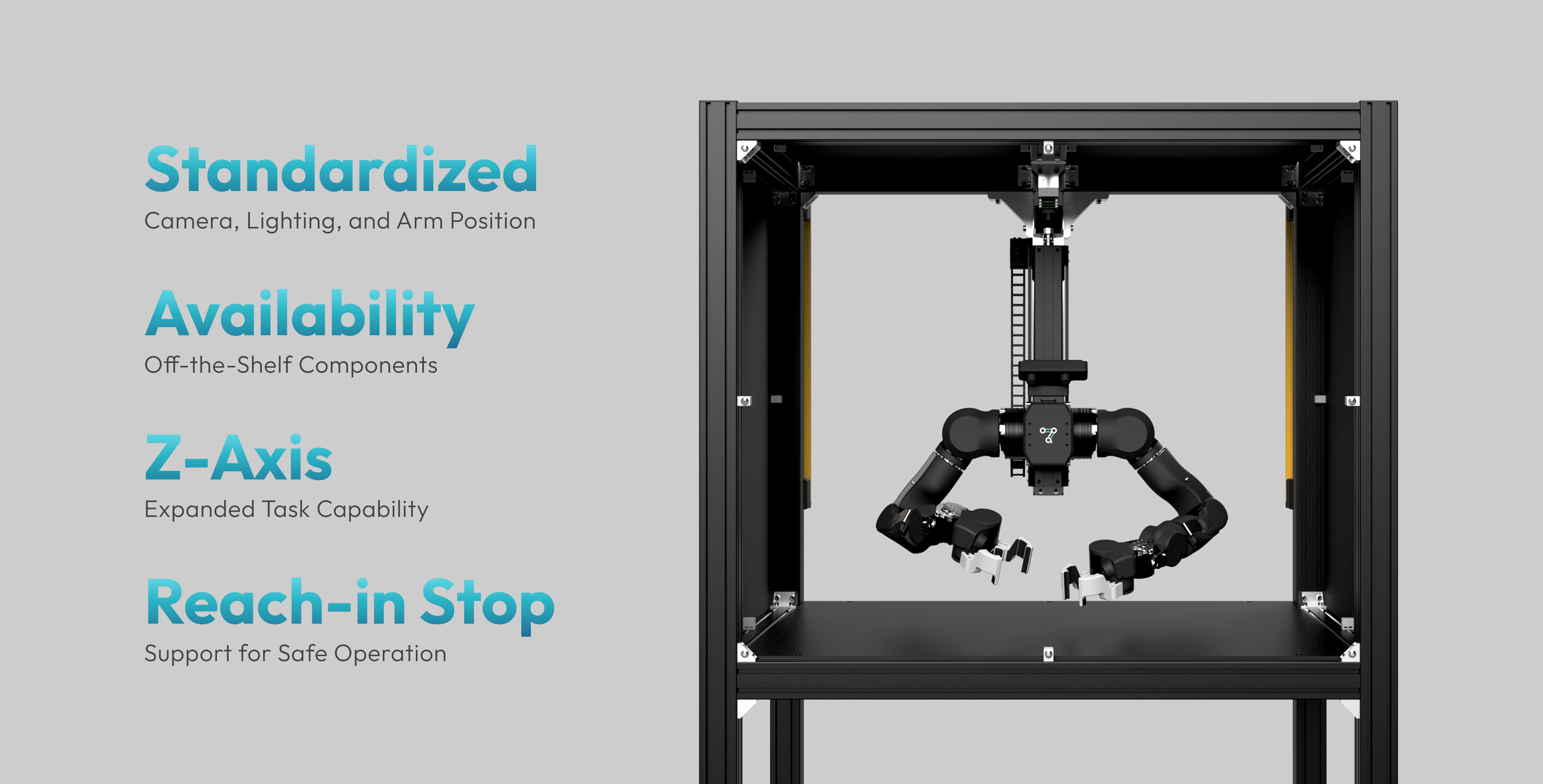
Background, arm position, lighting, and camera placement are all standardized. Any Cell anywhere guarantees identical evaluation conditions.
A lift system moves both arms vertically as a unit, greatly expanding the reachable workspace for tasks at varying heights.
Light curtains, emergency stops, and upgraded power systems enable safe 24/7 continuous evaluation at scale.
AI models can be automatically evaluated and compared without manual intervention, enabling fair and scalable benchmarking.
Kinematic Equivalent Replica
A lightweight, shoulder-mounted passive arm with the same kinematic structure as OpenArm — zero actuators, zero resistance. Purpose-built for long-session, high-quality teleoperation data collection.


Identical axis configuration, link ratios, and degrees of freedom. 1:1 motion mapping to OpenArm with human-like articulation.
Lightweight, wearable design fits naturally on the operator's body for intuitive, high-freedom-of-movement operation.
No actuators means no cogging torque or motor resistance. Operators can collect data for extended sessions without fatigue.
Open to all builders, researchers, and robotic enthusiasts. Directly reach our team for questions, feedback, and collaboration opportunities.



We’d love to hear what you’re working on, answer any questions, or explore ways to collaborate.
We’re always excited to meet with engineers, researchers, and partners to shape the future of physical AI together.
OpenArm is a project by Enactic, Inc.
We develop robots at our lab in Tokyo, Japan.
Join the Enactic team.

